Echo Bruit
n° 136
g
Dossier :
Eco-quartiers et
environnement sonore
17
le magazine de l’environnement sonore
de véhicule et une combinaison de pneumatique/revêtement
de chaussée pour l’ensemble de la plage de vitesses et
régimes moteur.
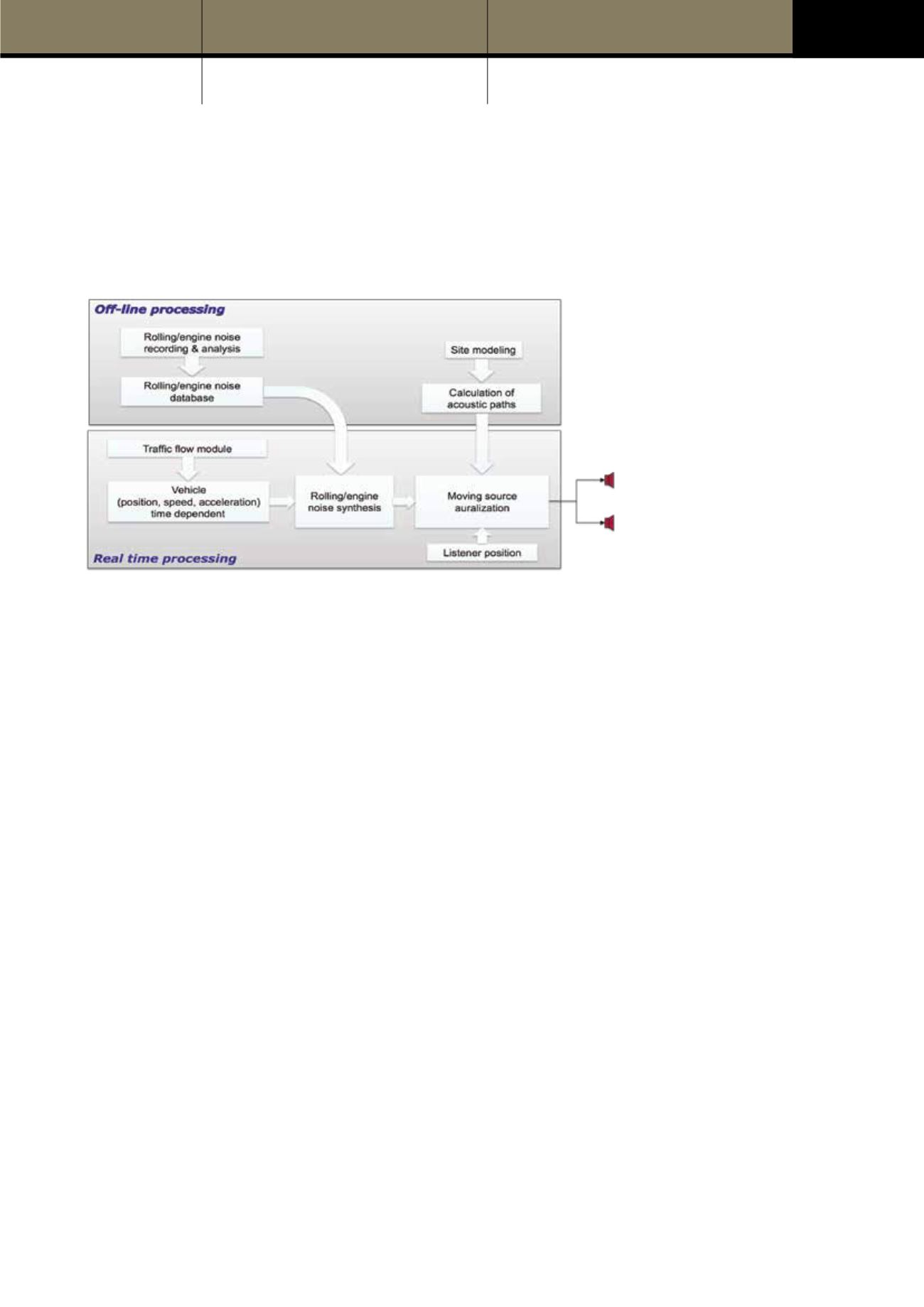
Les modules « temps réel » incluent le module de simulation
du trafic, de synthèse des signaux source et d’auralisation
de sources en mouvement. La simulation du trafic utilise le
moteur Symuvia du LICIT, laboratoire IFSTTAR. Ce moteur est
basé sur un modèle de trafic macroscopique qui fournit à
pas de temps discrets la position, vitesse et accélération de
l’ensemble des véhicules présents sur le réseau. Pour chaque
véhicule auralisé, le module de synthèse utilise le type de
véhicule, revêtement de chaussée, vitesse et accélération
pour piloter la génération des signaux source du bruit
moteur et de roulement. Chaque signal est ensuite envoyé
au module d’auralisation qui implémente les étapes de
traitement du signal nécessaires à la modélisation des effets
de propagation le long d’un ensemble de trajets acoustiques
dont les caractéristiques évoluent suivant les déplacements
du véhicule sur le réseau et de l’auditeur. Enfin, chaque trajet
acoustique est spatialisé en fonction de sa direction d’arrivée
au point d’écoute.
Synthèse des signaux source de bruit
routier
Comme évoqué précédemment, les bruits moteur et roulement
constituent deux sources indépendantes. La synthèse temps
réel de ces deux composantes utilise une technique de
synthèse granulaire mise au point spécifiquement pour ce
type de signaux. Dans cette approche, des bases de données
comportant environ un millier de signaux élémentaires
sont construites à partir de l’extraction de segments issus
d’enregistrements du bruit moteur et pneumatique pour des
régimes et vitesses variant sur l’ensemble de la plage utile. Les
enregistrements du bruit
de roulement sont réalisés
pour des décélérations
entre vitesse maximale et
vitesse minimale. Chaque
segment élémentaire
de signal (grain) extrait
représente ainsi le
bruit source du contact
pneu/chaussée pour
une vitesse donnée. Les
enregistrements du bruit
moteur sont obtenus
à partir de montées
en régime du moteur,
véhicule à l’arrêt, le
microphone de prise de
son étant positionné à
proximité du bloc moteur.
L’extraction des grains est
réalisée de manière à inclure exactement le bruit émis par
un cycle complet du moteur pour un régime donné. Lors de
la phase de synthèse, les signaux source des bruits moteur
et roulement sont générés en temps réel en assemblant les
grains élémentaires associés aux valeurs cibles de régime
moteur et vitesse du véhicule. La puissance de calcul
nécessaire est faible et permet la synthèse temps réel d’au
moins une centaine de véhicules simultanément sur les
machines récentes. Cette approche fait l’objet d’un dépôt de
brevet.
Modélisation des effets de propagation
Suivant le modèle de propagation Harmonoise, les trajets
sonores entre chaque segment de voie et l’ensemble des
récepteurs sont calculés pour différentes hauteurs de sources
au-dessus du sol afin de modéliser les sources principales des
véhicules légers, poids-lourds et 2-roues. Chacun de ces trois
types de véhicules peut ainsi être auralisé sur chaque voie de
circulation en sélectionnant le chemin adéquat. Un chemin de
propagation est caractérisé par son atténuation acoustique,
la position de la source ainsi que la matrice de transformation
associée à la source image. La matrice de transformation
associée à la source image est utilisée tout d’abord pour
calculer la position de la source image (image de la source
réelle après réflexions sur les bâtiments et écrans) et donc
le retard de propagation du trajet et sa direction d’arrivée, et
d’autre part pour identifier les chemins cohérents entre deux
Vue générale du système d’auralisation pour la partie bruit de trafic. Les modules dans le cadre
supérieur (hors temps réel) sont utilisés lors d’une étape de pré-calculs ; les modules du cadre
inférieur sont exécutés en temps réel lors de la restitution sonore


