48
Acoustique et défense
66
Expériences à échelle réduite de la propagation acoustique par petits fonds et par grands fonds marins
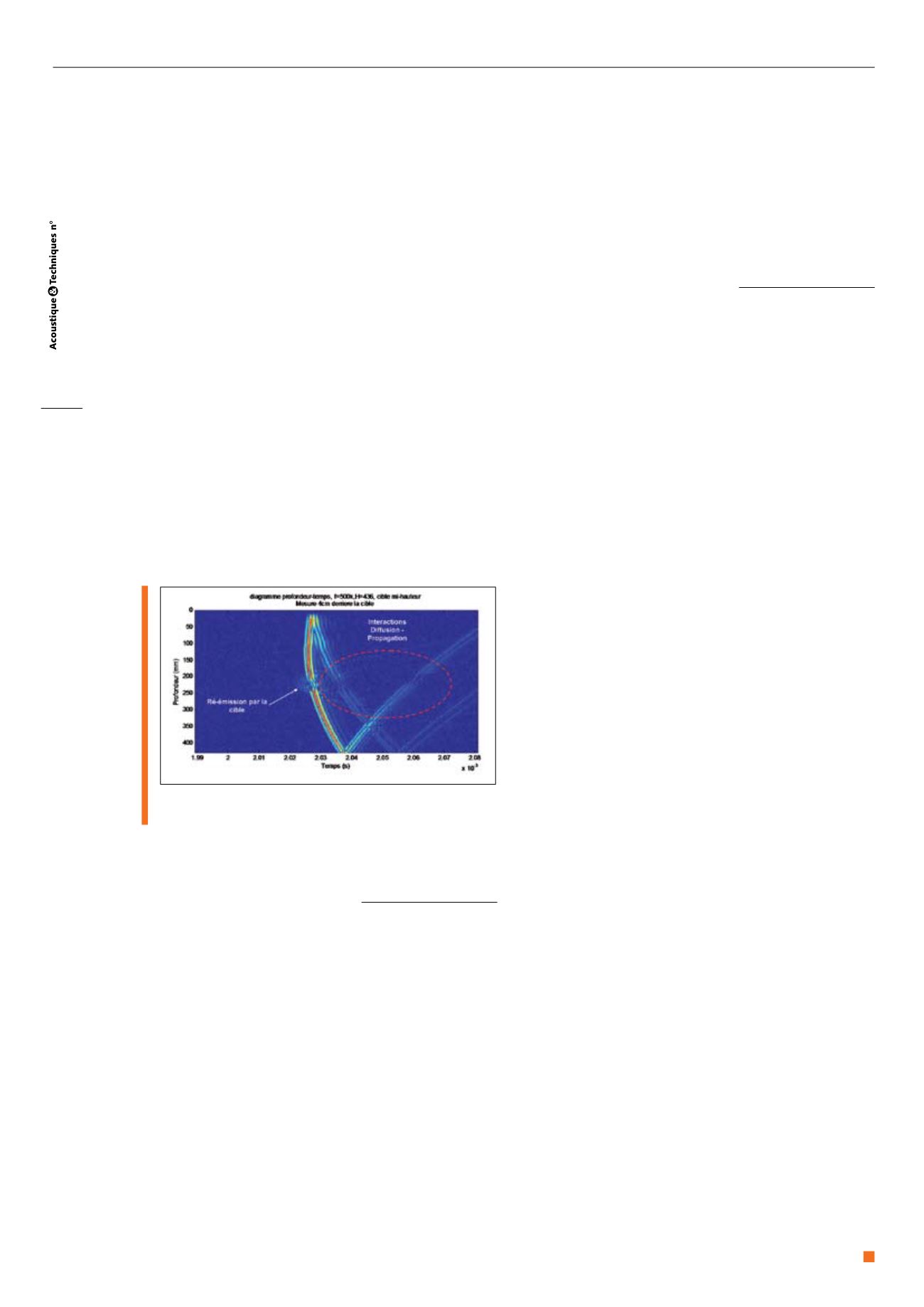
Profondeur 436 mm, fréquence 500 kHz
Dans cette expérience on a augmenté à la fois la profon-
deur d’eau et la fréquence de manière à simuler par exem-
ple l’effet d’un sonar haute fréquence travaillant par grands
fonds. Comme précédemment nous avons positionné la
cible à mi-hauteur. On a mesuré le signal transmis sur une
ligne verticale à 4 cm derrière la cible. Cette fréquence
de 500 kHz correspond à une région de fortes résonan-
ces de la cible, et des ondes de surface assimilables
à des ondes de Lamb symétriques et antisymétriques,
peuvent effectuer plusieurs fois le tour de l’objet. Ces
ondes se propagent à des vitesses de groupe de l’ordre
de 1900 m/s sur la coque tout en rayonnant constam-
ment de l’énergie dans le milieu extérieur [13]. Avec une
antenne réceptrice placée en mode « transmission » on
s’attend donc à recevoir des signaux provenant de la
cible, avant l’arrivée de l’onde directe qui s’est propagée
dans l’eau à vitesse plus lente. C’est ce que montre clai-
rement la Figure 11 où l’on peut observer l’arrivée d’un
signal « précurseur » indiquant la présence d’une cible
sur le trajet acoustique.
En plus de cette arrivée directe on peut observer sur la
figure 11 un effet d’ombre qui se manifeste clairement
sur les fronts d’ondes correspondant aux réflexions par
la surface libre du milieu et par le fond.
Fig. 11 : Diagramme Temps-Profondeur récepteur, mesuré
à une distance de 4 cm derrière la cible
Conclusions et perspectives
Dans cette étude on a simulé différentes conditions de
propagation d’un signal acoustique dans le milieu marin
et différentes conditions de détection d’une cible dans ce
canal de transmission. On a balayé à la fois la fréquence
d’émission, mais aussi la profondeur d’eau pour couvrir
des conditions intéressant la détection sonar.
Ces essais en cuve ont montré une grande souplesse et
une approche nouvelle pour tester des modèles numé-
riques. Les conditions de reproductibilité des expérien-
ces et la possibilité de contrôler tous les paramètres en
font un instrument privilégié pour l’étude de phénomènes
complexes apparaissant en mer.
Après avoir montré la faisabilité d’une telle approche sur
maquette pour appréhender des phénomènes complexes,
l’intérêt va se porter maintenant vers des situations de plus
en plus proches de la réalité ; les études qui pourront être
menées au cours des prochaines années vont concerner
la propagation acoustique dans des milieux fluctuants et
les traitements d’antennes en présence de décohérence
du milieu, la scintillation acoustique très basse fréquence
et la propagation de bruits proches du bruit de mer, la
détection d’objets très proches des interfaces….
Ce travail a été soutenu par un contrat passé avec la DGA/
Techniques Navales.
Références bibliographiques
[1] C.C. Leroy, “Sound propagation in the Mediterranean sea,” in Underwater
Acoustics, Vol 2, 203-241, V.M. Albers(Ed) Plenum Press, New-York (1967)
[2] C.S. Clay and H. Medwin, “Acoustical Oceanography,” Wiley; New-York (1977)
[3] C. Gazanhes, and J.L. Garnier, “Experiments on sigle mode excitation in
shallow water propagation,” J. Acoust. Soc. Am. 69 963-969, (1981).
[4] P. Papadakis, M. Taroudakis, F. Sturm, P. Sanchez and J.P. Sessarego,
“Scaled Laboratory Experiments of Shallow Water Propagation: Calibration
phase,” Acta Acustica/Acustica Vol 94, n°5, 676-684, (2008).
[6] M. Tran Van Nhieu, “Scattering from slender bodies in a homogeneous
waveguide,” J. Acoust. Soc. Am. 88(6), 2880-2888, (1990).
[7] F. Ingenito,”Scattering from an object in a stratified medium,” J. Acoust. Soc.
Am. 82, 2051-2059, (1987).
[8] A. Tolstoy, “3-D propagation issues and models,” J. Comput. Acoust. 4(3),
43-271 (1996).
[9] F. Sturm, “Numerical simulations with 3DWAPE considering shallow water
range-dependent environments, ” J. Acoust. Soc. Am. 109(5), 2334-2335 (2001).
[10] A. Korakas, F. Sturm, J.-P. Sessarego, D. Ferrand, “ Scaled model
experiment of long-range across-slope pulse propagation in a penetrable wedge,”
J. Acoust. Soc. Am., 126(1), EL22-EL27, (2009).
[11] J-P. Sessarego, A.N. Ivakin, and D. Ferrand, “Frequency dependence of
phase speed, group speed and attenuation in water-saturated sand: Laboratory
experiments,” IEEE J. Ocean. Eng. 33(4), 359-366, (2008).
[12] J.L. Rousselot, A. Gérard, J-P. Sessarego, J. Sageloli, « Réponse basse
fréquence d’une coque sphérique immergée, » Acustica, Vol 66, 1988.
[13] J-P Sessarego, P. Cristini, N.S. Grigoryeva, and G.M. Fridman,
“Backscattering by a spherical shell close to the air-water interface: comparison
tank experiment/modelling,” European Conference in Underwater Acoustics
(ECUA2010), Istanbul 5th-9th July 2010.


