9
68
Spécial « Congrès Acoustics 2012 »
Un capteur de nouvelle génération pour la mesure d’impédance acoustique en contexte industriel
Principe de fonctionnement du capteur
d’impédance
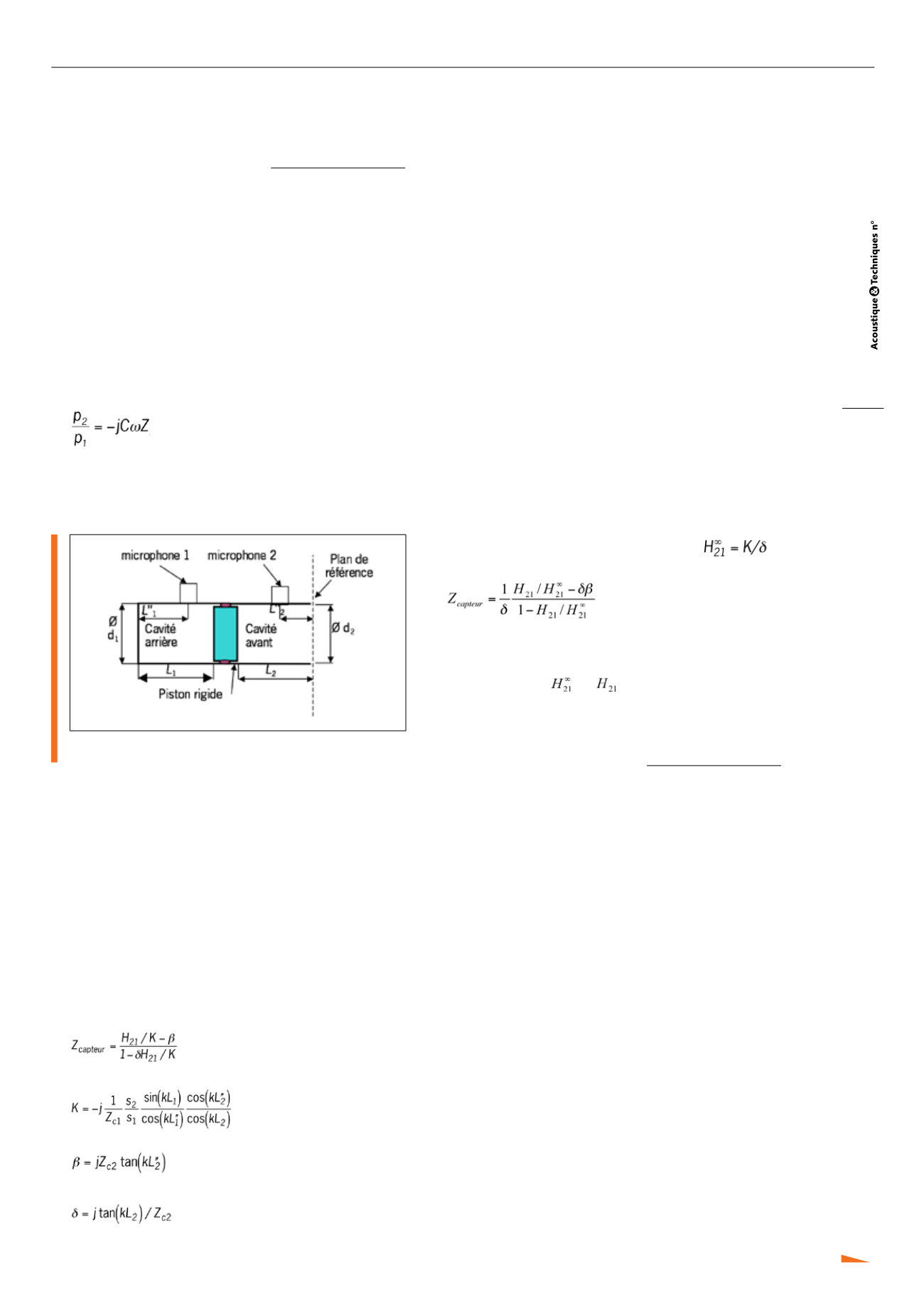
Le principe du capteur d’impédance est basé sur l’utilisa-
tion d’une source de débit acoustique connu. Ce dernier
est produit par un piston oscillant le plus rigide possible
afin de rejeter les résonances mécaniques au-delà de la
bande de fréquence d’analyse. La face arrière du piston
est chargée par une cavité fermée, la face avant étant
située du coté de l’objet à mesurer (figure1). Les pres-
sions acoustiques au niveau des faces avant p
2
et arrière
p
1
sont mesurées par deux microphones. Au premier ordre,
la pression p
1
est reliée au débit acoustique U délivré par
le piston rigide via les caractéristiques du volume arrière.
L’impédance Z
capteur
= p
2
/U est donc directement obtenue
à partir du rapport des pressions mesurées :
capteur
(1)
où C=V/
ρ
c
2
est la compliance acoustique de la cavité
arrière de volume V,
ρ
désignant la masse volumique de
l’air et c la célérité du son.
Fig.1 : Schéma de principe du capteur d’impédance et notations
Scheme of impedance sensor principle and notations
En pratique la validité de l’équation (1) est limitée aux très
basses fréquences et suppose des microphones parfai-
tement appairés. Il est ainsi nécessaire de tenir compte
des différences de sensibilité entre les deux micropho-
nes, grandeurs susceptibles de varier avec la fréquence.
En effet la quantité fournie par le capteur (avant post-trai-
tements) est la fonction de transfert entre les deux micro-
phones H
21
= p
2
s
2
/p
1
s
1
, où s
1
et s
2
désignent les sensibi-
lités des microphones 1 et 2. Par ailleurs, pour optimiser
les performances du capteur aux hautes fréquences, il
faut intégrer les caractéristiques géométriques des cavi-
tés supposées cylindriques dans l’expression de l’impé-
dance Z
capteur
, qui devient alors [2] :
(2)
où
(3)
(4)
(5)
Les longueurs L
1
, L
2
, L’’
1
et L’’
2
décrivent la géométrie des
cavités et la position des microphones (figure 1).
Les impédances Zc
1
=
ρ
c/S
1
et Z
c2
=
ρ
c/S
2
sont les impé-
dances caractéristiques des cavités arrière et avant
(S
1
=
π
d
1
2
/4 est la surface de la cavité arrière et d
1
son
diamètre, qui est identique à celui de la cavité avant).
Au premier abord, on peut considérer que les caracté-
ristiques géométriques des cavités sont bien connues
et que seules les sensibilités des microphones doivent
être identifiées pour étalonner le capteur d’impédance.
En pratique, il convient de s’affranchir des dispersions
géométriques issues de la fabrication du capteur en procé-
dant à un étalonnage après fabrication. Celui-ci utilise une
procédure basée sur la mesure de charges acoustiques
non-résonantes [4-6]. Cet étalonnage «d’usine» permet
alors de figer les caractéristiques géométriques du capteur.
En usage courant, une calibration partielle à partir d’une
procédure simplifiée (mesure de l’impédance d’une paroi
parfaitement rigide) est suffisante [2].
Dans le cas d’une application «basses fréquences», la procé-
dure décrite ci-dessus peut être simplifiée. En fermant la
cavité avant du capteur par une paroi rigide, l’expression
de la fonction de transfert se réduit à :
,
et l’équation (2) s’écrit alors :
(6)
Connaissant les longueurs L
2
and L”
2
(qui peuvent être
estimées par une mesure directe) l’impédance acousti-
que est ainsi obtenue uniquement à partir des deux fonc-
tions de transfert
et
, cette dernière étant mesu-
rée en chargeant le capteur par l’objet à caractériser.
Description du capteur d’impédance
Dans la structure du capteur d’impédance, le composant
critique est la source de débit. Celle-ci doit présenter les
caractéristiques suivantes :
- Membrane se comportant comme un piston parfaite-
ment rigide jusqu’à des fréquences élevées,
- Absence de fuites entre les faces avant et arrière de la
membrane.
Sans ces deux caractéristiques essentielles, l’estimation
du débit acoustique généré devient imprécise, ce qui limite
les performances du capteur. La technologie utilisée pour
la source a donc été l’objet d’une attention particulière au
cours des développements des différents prototypes de
capteur d’impédance réalisés par le LAUM et le CTTM.
La première génération employait un transducteur élec-
trodynamique du commerce [1], qui a été remplacé dans
la seconde génération par un transducteur piézo-électri-
que [2]. La troisième génération de capteur d’impédance
fabriqué au CTTM est présentée en figure 2. Elle utilise
un transducteur électrodynamique innovant, quasiment
exempt de fuites et à membrane légère et rigide. Deux
microphones à électret très stables, avec une électroni-
que de conditionnement dédiée, sont utilisés pour mesurer
les pressions avant et arrière. Comme la procédure d’éta-
lonnage compense le rapport des sensibilités, il n’est pas
nécessaire de recourir à des micros appairés plus onéreux.


