Version HTML de base


59
À partir de cette modélisation, on trace le diagramme
des résidus en ajoutant la distinction suivant la cylindrée
(figure 6). Suivant ce graphe, on distingue nettement les
deux populations dépendant de la cylindrée.
La modélisation en allure accélérée est une première appro-
che puisqu’il n’est pas tenu compte de la valeur numéri-
que de l’accélération. Elle semble cependant suffisante
pour délimiter un cadre aux études d’impact.
Abaques de puissance acoustique
Suite à l’expérimentation sur le circuit d’Issoire (63), il est
possible de définir un abaque de puissance acoustique en
regroupant les 5 catégories des motos étudiées. À titre
de comparaison, on a calculé le niveau de puissance d’un
VL et d’un PL sur un revêtement R2 âgé de 5 ans, qu’on
peut considérer comme un revêtement typique du réseau
routier actuel sur le plan acoustique [5].
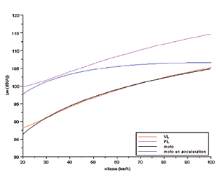
Les deux-roues sont modélisés de la façon suivante :
Lw
A
en allure accélérée= 26,3 log
10
(V) – 0,12 V+ 65,9
Lw
A
à vitesse stabilisée= 26,3 log
10
(V) + 52,2
Fig. 7 : Abaques des deux-roues en allure stabilisée et
accélérée sur un revêtement R2 âgé de 5 ans
Les abaques de la figure 7 montrent que la puissance
acoustique d’une motocyclette en allure stabilisée est
similaire à celle d’un VL moyen et inférieure à celle d’un
PL. En allure accélérée, à basse vitesse, la puissance
acoustique d’une motocyclette est proche de celle d’un
PL moyen. Lorsque la vitesse augmente, le PL moyen
devient significativement plus bruyant. Pour permet-
tre un calcul prévisionnel en tiers d’octave, le tableau 4
indique les valeurs du spectre normalisé à 0 dB(A) des
deux-roues.
(Hz)
100 125 160 200 250 315 400 500 630
2 roues -24 -23 -22 -22 -22 -21 -18 -14 -12
(kHz)
0,8 1 1,25 1,6 2 2,5 3,15 4 5
2 roues -11 -11 -11 -11 -11 -10 -10 -10 -9
Tabl. 4 : Répartition spectrale du bruit des deux-roues
Mesures sur véhicules du flot
Description des campagnes
Des mesures de bruit de roulement au passage de deux-
roues de grosse cylindrée ont été réalisées sur la route
des crêtes en Alsace [9], [10]. Le protocole de mesure
s’inspire de la norme NF EN ISO 11819-1 [8] avec un micro-
phone à 7,5 m de l’axe de la voie (sens 1 – côté droit des
motos) et à une hauteur de 1,2 m. Un deuxième micro-
phone (sens 2 – côté gauche des motos) est disposé à la
même distance du sens de circulation opposé. Le profil
en travers entre les deux sens de circulation est dénué de
discontinuité d’impédance. En parallèle, la vitesse des véhi-
cules est relevée à l’aide d’un cinémomètre. Pour chaque
passage, on extrait le L
AF
max ainsi que la décomposition
spectrale correspondante par tiers d’octave. Seuls les
véhicules en allure stabilisée ont été retenus.
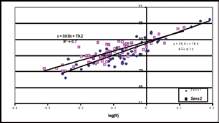
Résultats des mesurages
Pour chaque campagne de mesure et par sens de
mesure, on identifie par régression un modèle de la
forme L
AF
max=Alog
10
(V/90) + B, où V est la vitesse du
véhicule en km/h.
La figure 8 illustre les régressions obtenues. Le tableau
5 indique les résultats L
AF
max pour chaque campagne
de mesure pour les vitesses de 50 et 90 km/h et par
sens de mesure.
Fig. 8 : Régressions pour les mesures du 31/08/2008
Pour toutes les campagnes de mesure, la pente de la régres-
sion linéaire du sens 2 est toujours plus faible que celle du
sens 1. Actuellement, il n’est pas possible d’expliquer la diffé-
rence de comportement entre les deux sens. La totalité des
campagnes correspond à 258 passages avec une vitesse
moyenne des passages de 72 km/h. Les vitesses rencon-
trées représentaient une gamme de 44 à 140 km/h.
Date
Sens
LAFmax
(90 km/h)
LAFmax
(50 km/h)
Pente
29/06/08 1
79,3
70,4
34,8
31/08/08 1
78,7
69,3
36,8
30/08/09 1
78,8
68,2
41,4
29/06/08 2
78,5
71,6
27,1
31/08/08 2
79,2
71,3
30,8
30/08/09 2
79,6
72,6
27,5
Tabl. 5 : Résultats des campagnes de mesures
en niveau sonore global (dB(A))
Emission acoustique des deux-roues motorisés / 2
e
partie : Les motocyclettes