Version HTML de base


54
b (LAmax) a (pente)
sens1 sens2 2sens sens1 sens2 2sens
A
74,3 75,3 74,8 25 30 27
B
75,9 77,3 76,5 26 26 26
C
74,9 74,5 74,7 23 25 24
D
74,7 72,7 73,6 37 34 35
E
74,5 72,9 73,9 43 31 38
F
77,2 75,9 76,5 38 42 40
G
75,3 73,6 74,3 34 34 34
H
77,7 74,1 75,5 34 23 26
I
78,3 76,8 77,5 19 35 33
J
80,0 78,2 79,1 34 39 31
K
80,0 78,0 79,0 39 32 35
L
79,9 75,8 78,2 44 25 35
M
76,7 75,4 76,7 18 16
18
N
76,8 78,8 77,8 27 40 35
O
73,6 73,8 73,8 8
12
10
P
79,7 76,0 78,4 49 35 42
Q
77,0 75,0 76,0 24 18 21
R
73,7 71,5 72,6 38 25 30
Tabl. 2 : Résultats à vitesse stabilisée
(sens 1 : côté échappement, sens 2 : opposé)
L’analyse de ces résultats permet de faire les remarques
suivantes sur les niveaux en dB (A) :
- globalement les niveaux mesurés côté échappement
sont en moyenne plus élevés de 1,3 dB (A) par rapport
au sens opposé, le carénage du moteur peut expliquer
cette légère différence ;
- les niveaux LAmax sur les cylindrées inférieures à 50 cm
3
sont plus élevés par rapport aux cylindrées supérieures.
Cela s’explique notamment par un régime moteur plus élevé
pour une même vitesse lorsque la cylindrée diminue ;
- la dispersion des niveaux sur un modèle de même âge reste
limitée (moins de 1 dB (A) pour les véhicules J, K et L) ;
- l’étendue des valeurs relevées sur six scooters de même
marque et modèle (O/vi) est de 4,5 dB (A). Il n’a pas été
établi de relation âge/kilométrage/année ;
- les valeurs des pentes sont très variables d’un véhicule
à l’autre et dans une moindre mesure d’un sens à l’autre,
pour un véhicule donné.
Le spectre des 50 cm
3
se différencie des 125 cm
3
notam-
ment par des fréquences marquées sur les tiers d’octa-
ves 125 et 250 Hz (Figure 4).
En accélération/décélaration
Sur certains véhicules, des passages en accélération et
décélération suivant la procédure décrite au paragraphe
Déroulement des acquisitions sont réalisés. Le tableau 3
présente les différences par rapport à l’allure stabilisée
à 30 et 50 km/h. Cela confirme l’importance de l’allure
comme facteur influençant largement le niveau sonore.
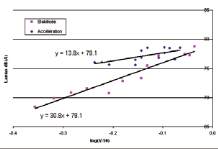
On constate en accélération que la différence tend vers
zéro pour la vitesse maximale de circulation du véhicule.
Ceci est illustré sur la figure 2.
[Accélération-Stabilisé] [Décélération-Stabilisé]
30km/h 50km/h 30km/h 50km/h
A
11,2
7,4
-2,2
-1
B
12,6
6,2
-4,7
-5
I
5,4
2
-8,7
-6,4
J
3,8
0
-
-
M
2,5
1,5
-
-
Q
4,3
2
-
-
Tabl. 3 : Ecarts en dB (A) à différentes allures et vitesses
Fig. 2 : Droite de régression sur le véhicule J, en
accélération et à vitesse stabilisée
Hauteur de source [8]
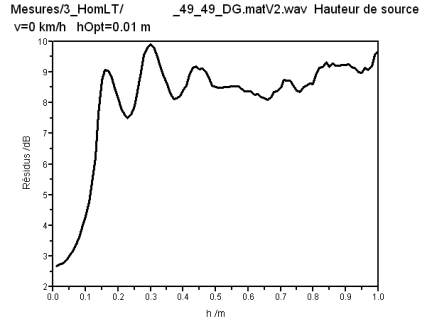
Le tableau 4 présente les résultats moyens obtenus sur les
véhicules A, G et H. L’optimisation conduit à une hauteur
de source équivalente très proche du sol (1 cm), comme
le montre la figure 3.
Hauteur de source (m) Ecart-type
sens 1 sens 2 sens 1 sens 2
A
0,02
0,02
0,02
0,01
G
0,02
0,01
0,01
0
H
0,01
0,01
0
0
Tabl. 4 : Hauteur de source équivalente et écart-
type moyen associé pour 3 scooters
Fig. 3 : Mesure de hauteur de source équivalente – fonction
coût typique pour les petites cylindrées
Comparaison à l’émission des véhicules légers
Une comparaison avec l’émission des véhicules légers
(VL) pour l’allure stabilisée afin d’estimer les diffé-
rences de niveaux par bande de tiers d’octave et en
dB(A) a été menée. Contrairement aux motocyclet-
tes, le bruit de roulement sur les VL est la source de
bruit prépondérante même à la vitesse de 50 km/h.
Émission acoustique des deux-roues motorisés / 1
ère
partie : Scooters et cyclomoteurs