Version HTML de base



12
Capteurs résonants M/NEMS et phénomènes non linéaires
Le réglage du gap g et de niveau de la tension continue
Vdc de l’électrode d’activation pilote le type de compor-
tement. La Figure 4 présente les quatre comportements
obtenus d’une poutre encastrée-encastrée de longueur
de 200µm, de hauteur 4µm et de largeur 2µm. La raideur
géométrique en déflexion raidit alors que l’effet électri-
que assouplit. Il est à noter qu’un bon dosage des para-
mètres rend le comportement linéaire, élimine le phéno-
mène d’hystérésis sur la courbe de réponse (Vdc=6V,
g=500nm) et cible donc avec précision la fréquence de
résonance.
Fig. 4 : Différents types de comportement en flexion
dus au paramètre tension continue Vdc et
gap g de l’électrode d’activation
Les micro-gyromètres M/NEMS
Les différents types de micro-gyromètres
Le gyromètre est l ’un des capteurs les plus dif ficiles à
concevoir et à réaliser, notamment si on le compare à
un accéléromètre ou un capteur de pression. En simpli -
fiant à l ’extrême, le gyromètre peut être vu comme
deux composants MEMS de hautes per formances
travaillant ensemble : un résonateur à grande ampli -
tude de vibration et haut facteur de qualité vibrant
suivant l ’axe d’excitation, et un accéléromètre devant
mesurer des µg suivant l ’axe orthogonal pour détec-
ter une force de Coriolis de plusieurs ordres de gran-
deurs inférieures aux forces en jeu dans les accéléro-
mètres conventionnels.
Les gyromètres les plus facilement intégrables en tech-
nologies, microsystèmes sont les gyromètres vibrants :
la structure mécanique est excitée en vibration selon un
mode donné et on détecte une vibration induite par la rota-
tion du capteur selon un autre mode. Parmi ces micro-
gyromètres vibrants, on distingue un certain nombre de
grandes catégories :
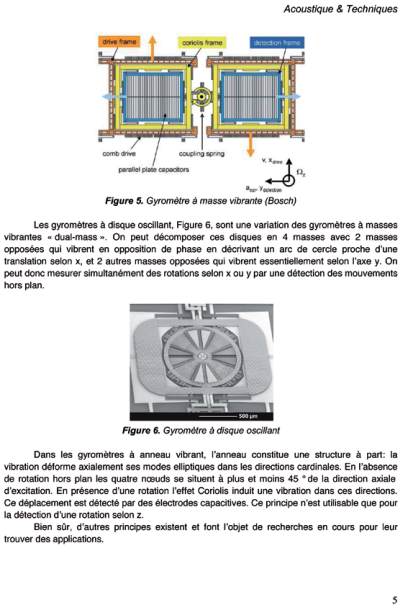
Le principe de gyromètres à masses vibrantes (ou
diapason), Figure 5, est le plus utilisé. Ce système est
composé de 2 ensembles d’oscillateurs mécaniques. Un
premier ensemble est mis en mouvement par une exci -
tation la plus couramment électrostatique; une rotation
du capteur crée une force de Coriolis qui vient exciter
le deuxième ensemble d’oscillateurs. Ces gyromètres
se composent généralement de deux structures iden-
tiques excitées en opposition de phase, ce qui permet
de réduire la sensibilité aux accélérations parasites; on
parle alors de « dual -mass ».
Fig. 5 : Gyromètre à masse vibrante (Bosch)
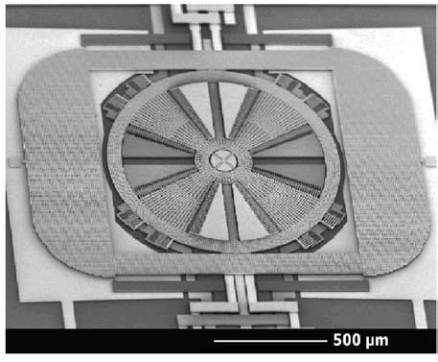
Les gyromètres à disque oscillant, Figure 6, sont une
variation des gyromètres à masses vibrantes « dual -
mass ». On peut décomposer ces disques en 4 masses
avec 2 masses opposées qui vibrent en opposition de
phase en décrivant un arc de cercle proche d’une trans-
lation selon x, et 2 autres masses opposées qui vibrent
essentiellement selon l’axe y. On peut donc mesurer
simultanément des rotations selon x ou y par une détec-
tion des mouvements hors plan.
Fig. 6 : Gyromètre à disque oscillant
Dans les gyromètres à anneau vibrant, l’anneau consti -
tue une structure à part: la vibration déforme axiale-
ment ses modes elliptiques dans les directions cardi -
nales. En l ’absence de rotation hors plan les quatre
nœuds se situent à plus et moins 45 ° de la direction
axiale d’excitation. En présence d’une rotation, l’effet
Coriolis induit une vibration dans ces directions. Ce
déplacement est détecté par des électrodes capaciti -
ves. Ce principe n’est utilisable que pour la détection
d’une rotation selon z.
Bien sûr, d’autres principes existent et font l ’objet
de recherches en cours pour leur trouver des appli -
cations.