Version HTML de base


66
Spécial “ 5es Assises sonore ”
Acoustique
&
Techniques n° 51
La prévision du bruit de trafic en milieu urbain : apport de la modélisation dynamique
Symubruit : la structure du modèle
La finalité du modèle de prévision dynamique de bruit de
trafic Symubruit est d’estimer les niveaux de bruit émis
par un trafic s’écoulant sur un réseau (par exemple : une
artère principale et la voirie adjacente), en tenant compte
des caractéristiques de ce trafic (composition, débit,
concentration…), des aménagements spécifiques ou des
singularités spatio-temporelles contraignant cet écoulement
(feux tricolores, giratoires…) et de la géométrie de
l’environnement de ce réseau (habitat). Cette estimation
s’effectuant de façon dynamique, une double discrétisation
du réseau modélisé est nécessaire :
- une discrétisation spatiale, visant à segmenter le réseau
en cellules (portion de voies d’une vingtaine de mètres de
longueur) dans lesquelles seront estimées les principales
caractéristiques du flux de trafic
- une discrétisation temporelle (de l’ordre de la seconde)
visant à évaluer l’évolution de cet écoulement dans le
temps.
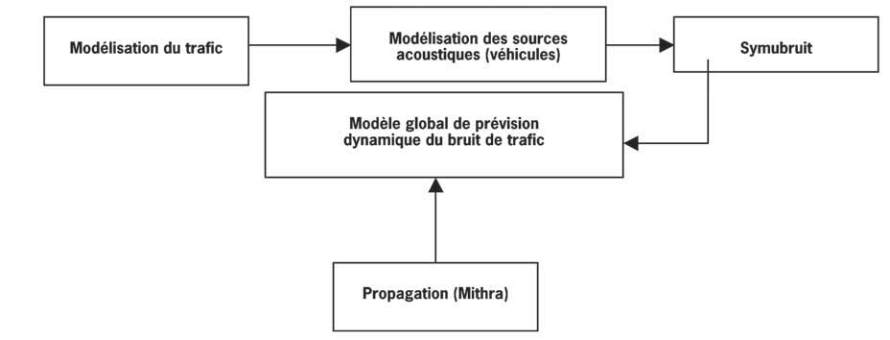
La structure générale du modèle global, schématisée
figure 1, repose sur l’interfaçage de trois classes de sous-
modèles:
- des modèles de trafic décrivant l’écoulement des
véhicules sur un réseau urbain ;
- des modèles d’émission de bruit dont l’objectif est de
produire l’information utile sur les émissions acoustiques
des différentes catégories de véhicules considérées ;
- un modèle propagatif dont la finalité est de calculer le
niveau de bruit reçu en façade de bâtiment en prenant
en compte tous les paramètres influençant la propagation
du son (distance émetteur/récepteur, nature du sol,
météorologie…).
Le modèle de trafic
L’objectif affiché du modèle de trafic est de simuler
l’évolution temporelle des principales variables décrivant
le trafic s’écoulant sur un réseau donné : densité du trafic,
vitesse et accélération du flux, …. Le modèle de trafic
utilisé ici est un modèle macroscopique du 1er ordre, qui
décrit le comportement du trafic par analogie à un celui
d’un fluide s’écoulant à l’intérieur d’un tuyau. Le trafic peut
alors être caractérisé par trois grandeurs :
- le débit Q (nombre de véhicules passant en un point par
unité de temps, exprimé en véh.s
-1
)
- la densité K (nombre de véhicules situés par unité de
longueur, exprimée en véh.m
-1
)
- la vitesse du flot V (m.s
-1
), représentant la vitesse du flux
de trafic.
Ces trois variables sont reliées par des lois d’écoulement,
dont les fondements ont été posés par Lighthill, Whitham
[3] et Richards [4] :
(1)
Q x,t
( )
t
+
K x,t
( )
t
=
0)
Q( x,t )
=
K( x,t)V ( x,t)
Le système étant en permanence à l’équilibre, il existe une
relation bijective reliant la vitesse et la concentration :
V
=
V
eq
K( x,t )
[
]
(2)
Cette dernière relation est généralement réexprimée
en écrivant la dépendance du débit par rapport à la
concentration :
Q
=
KV
eq
K( x,t )
[
]
=
Q
eq
K( x,t )
[
]
(3)
Cette relation peut être schématisée par le diagramme
fondamental, illustré par la figure 2, qui peut être calibré à
l’aide des paramètres suivants :
- le débit maximum Q
max
correspondant au flux maximal
admissible sur la voie considérée ;
- la concentration critique K
c
correspondant à la densité
observée lorsque le débit est maximal ;
- la concentration maximale K
max
qui est la densité observée
dans le cas d’une file d’attente arrêtée ;
- la célérité w correspondant à la vitesse de remontée des
ondes de trafic lors d’un redémarrage de peloton.
Fig. 1 : Schéma de principe du modèle d’estimation
dynamique du bruit de trafic Symubruit