Version HTML de base



54
Spécial “ Acoustique sous-marine ”
Acoustique
&
Techniques n° 48
à l’avance, et mesurer à cet endroit précis le signal acoustique
reçu, envoyer les informations sur le calculateur « à terre »,
puis se déplacer vers un nouveau point de mesure lorsque
le transfert de données est terminé. Pour des questions
pratiques, la partie utile de la cuve a été limitée à une distance
de 5 à 6 m, bien que la cuve ait été conçue à l’origine pour
que l’on puisse travailler sur des distances beaucoup plus
grandes. Dans un souci de diminuer les réflexions parasites
sur les parois (surtout lorsqu’on travaille en régime continu),
on a dû disposer des absorbeurs acoustiques sur les bords
de la cuve. Ces absorbeurs sont des matériaux dits «
ρ
c ».
Aux fréquences utilisées, on a pu vérifier qu’ils avaient un
comportement tout à fait satisfaisant.
Rappelons enfin que le principe d’une telle expérimentation
à échelle réduite consiste à admettre que le rapport d’une
dimension caractéristique (ici la hauteur d’eau) par la longueur
d’onde est conservé lors du changement d’échelles, autrement
dit on a la relation suivante :
où h et
λ
(respectivement H et
Λ
) désignent l’épaisseur de la
colonne d’eau et la longueur d’onde acoustique avant (resp.
après) le passage à l’échelle réduite. Dans ces conditions, le
modèle expérimental élaboré (émission en mode continu à des
fréquences voisines de 100 kHz et pour des colonnes d’eau
d’une épaisseur de 5 cm) simule, avec un facteur d’échelle de
1000 par exemple, une propagation en mer à des fréquences
de 100 Hz sur des fonds de 50 m, la distance d’étude pouvant
s’étendre alors sur 6 km.
La « calibration » de la cuve océanique
Dans les nombreux essais effectués en laboratoire, nous
avons utilisé, soit des signaux monochromatiques (fréquence:
114 kHz) pour mettre en évidence les figures d’interférences
des modes de propagation, soit des signaux de type large
bande pour étudier plutôt l’aspect temporel. On a tout d’abord
testé la propagation avec des signaux monochromatiques,
l’objectif étant de calibrer la cuve et de retrouver pour le cas
d’un fond plat et d’une couche d’eau isocélère, les résultats
classiques donnés par les codes de propagation les plus
connus. Ces comparaisons entre les modèles (alimentés par
des données mesurées dans la cuve : vitesse du son dans
l’eau, vitesse du son dans le sédiment et densité du sable,
hauteur d’eau, immersion des capteurs) et l’expérience, ont
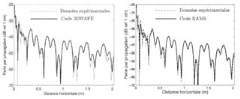
permis de « calibrer » la cuve. La Fig. 3 donne le résultat
d’une comparaison entre mesures expérimentales et données
simulées. Ces dernières ont été obtenues avec deux codes
de calcul distincts, 3DWAPE [3] et RAMS [7]. Sur cette figure,
où l’on a tracé les courbes de perte en fonction de la distance
émetteur-récepteur, on observe un bon accord entre les
résultats d’expérience et les différents codes de propagation
[8]. Le code RAMS qui prend en compte une faible vitesse de
cisaillement dans le sable semble mieux rendre compte des
phénomènes observés. Il est extrêmement difficile de mesurer
dans la cuve une vitesse de cisaillement du sédiment, mais
on peut en effet admettre qu’en raison du tassement et du
compactage du sable au cours du temps, une vitesse de
cisaillement de l’ordre de la centaine de m/s soit tout à fait
raisonnable.
Ainsi, moyennant la prise en compte d’une faible vitesse
de cisaillement dans le sédiment, on a pu obtenir une très
bonne concordance entre l’expérience et le modèle RAMS.
Le code 3DWAPE ne permettant pas actuellement de prendre
en compte une vitesse de cisaillement dans le fond, donne
des résultats légèrement moins bons, mais largement
acceptables.
Il est à noter que les codes 3DWAPE et RAMS ayant été conçus
pour des applications à échelle réelle (c’est-à-dire pour des
distances de propagation de l’ordre du km et des fréquences
de l’ordre de quelques dizaines d’Hz), il a fallu procéder à une
conversion d’échelles pour les tracés et opérer une translation
des courbes pour ajuster les niveaux de perte.
Le passage à des situations 3D plus proches des
situations réelles
Après la phase de calibration de la cuve, nous sommes passés
à l’exploitation de celle-ci dans des configurations plus réalistes
que les configurations à fond plat, ces dernières pouvant être
décrites par un simple modèle 2D de Pekeris. Pour tester les
modèles de propagation 3D, on a donc modifié la bathymétrie
de la cuve et une pente d’angle constant (
α
= 4.5°) a été
réalisée sur toute la longueur grâce à l’utilisation du râteau
précédent, muni d’une lame spécialement conçue pour réaliser
un fond incliné. Cette pente simule en milieu réel la transition
entre la côte et le plateau continental. Elle est identique à celle
de l’expérimentation en mer décrite dans [2]. L’objectif était de
reproduire à échelle réduite la propagation au-dessus d’un fond
incliné, en utilisant indifféremment un signal monochromatique
ou large bande. Dans ces conditions, compte tenu de l’angle
de la pente, des fréquences utilisées, de la hauteur d’eau et de
la position de la source par rapport au fond incliné, l’utilisation
en amont d’un code de calcul tridimensionnel (en l’occurrence
du code 3DWAPE) a permis de prévoir que des phénomènes
3D pourraient être observables dans la zone utile des six
premiers mètres de la cuve.
Fig. 2 : Vue d’ensemble de la cuve océanique
Fig. 3 : Comparaison entre des données expérimentales
et des simulations numériques obtenues au
moyen des codes 3DWAPE [3] et RAMS [7]
La propagation océanique en eau peu profonde : modèles et expérimentations