Version HTML de base


Spécial “ Acoustique sous-marine ”
53
Acoustique
&
Techniques n° 48
par le biais de nombreuses simulations numériques (voir la
référence [1] pour un état de l’art assez complet sur le sujet).
Tout récemment, la présence d’effets 3D a été observée lors
d’essais en mer à proximité de la côte, effets précisément
dus à la présence d’un fond pentu [2]. Prendre en compte
ces effets nécessite de reformuler les codes de propagation
dans des versions 3D, ce qui augmente considérablement les
temps de calcul, même avec l’emploi de machines parallèles.
Ceci s’aggrave encore si on passe au domaine temporel car,
dans ce cas, il faut recalculer le champ acoustique pour
toutes les fréquences contenues dans le signal d’émission.
On entrevoit ici toute la complexité de la mise en œuvre de
ces codes et les raisons pour lesquelles leur utilisation est
encore assez rare dans la communauté ASM.
Pour clarifier la pertinence ou non, de mettre en œuvre
des modèles 3D, une campagne de mesures dans la cuve
océanique du LMA (Laboratoire de Mécanique et d’Acoustique),
qui permet de simuler des fonds marins complexes, a été
décidée, et les résultats ont pu être confrontés au code
de calcul tridimensionnel 3DWAPE [3] développé au LMFA
(Laboratoire de Mécanique des Fluides et d’Acoustique).
Un exemple d’expérimentation en laboratoire
pour tester des modèles numériques
Le protocole expérimental
Une première expérimentation pour « calibrer » la cuve
océanique a été réalisée début 2005. Cette cuve rectangulaire
d’une longueur de 20 m, d’une largeur de 3 m, et d’une
profondeur de 1 m, est constituée d’une lame d’eau douce
dont on peut faire varier la hauteur de façon très précise à ±
0,2 mm. Cette lame d’eau repose sur une épaisse couche de
sable fin qui simule un fond océanique de profondeur semi-
infinie. Le fond sableux est parfaitement lissé avec un râteau
dédié à cette opération, afin de disposer d’une interface
plane et homogène (sans aspérités). On notera ici que la taille
moyenne des grains de sable (de l’ordre de 250
μ
m) étant
négligeable devant les longueurs d’ondes utilisées, on peut
négliger alors les aspects de diffraction et de réverbération
acoustique par des interfaces rugueuses. De plus, toutes les
caractéristiques du sable utilisé sont parfaitement connues.
Ceci est l’un des avantages des expérimentations en cuve où
l’on peut mesurer in situ tous les paramètres physiques qui
influent directement sur la réponse du système. C’est ainsi
que l’on a pu mesurer la granulométrie du sable, sa porosité,
sa tortuosité, et sa perméabilité. Tous ces paramètres
géotechniques sont donnés dans le tableau 1.
En plus de ces paramètres, la densité ainsi que la vitesse de
propagation des ondes de compression et leur atténuation,
ont été mesurées dans le sédiment. La densité a été mesurée
dans un sédiment saturé d’eau et non tassé. On a trouvé la
valeur de 1,999 g/cm
3
(± 0,01 g/cm
3
). La vitesse du sable
a été mesurée à des fréquences voisines des fréquences
utilisées pour l’expérimentation. La valeur trouvée à 100 kHz
est de 1670 m/s (± 5 m/s). Cette valeur dépend entre
autre de la température ambiante, qui est mesurée en
permanence dans la cuve. Elle dépend aussi fortement de
l’état de consolidation du sédiment. Pour les essais effectués
dans ce programme de recherche, nous avons été amenés
à ratisser le fond à de nombreuses reprises et avons donc
modifié l’état de consolidation de celui-ci. Il reste ainsi une
incertitude sur la valeur de la vitesse du son dans le sable ainsi
qu’une incertitude sur le profil de vitesse avec la profondeur.
Enfin, il est à noter que tous les paramètres géotechniques
et géoacoustiques mesurés pour notre sédiment et reportés
dans le tableau 1, sont cohérents avec les valeurs trouvées
par d’autres auteurs sur des types de sables très voisins [4],
[5], [6].
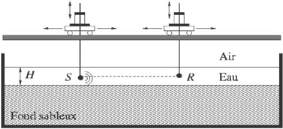
La Figure 1 donne le schéma du dispositif expérimental
utilisé. Un émetteur et un récepteur, montés sur des chariots
indépendants, sont positionnés dans la couche d’eau par
l’intermédiaire de moteurs à courant continu, qui permettent
d’obtenir des déplacements avec une précision de l’ordre
du dixième de mm. Des hydrophones servant d’émetteur ou
de récepteur, de tailles réduites, ont été fabriqués au LMA à
partir de petits éléments piézoélectriques de forme cylindrique
(diamètre interne: 4 mm, diamètre externe: 6 mm, longueur :
6 mm). Ils permettent d’émettre ou de recevoir à des
fréquences autour de 100 kHz. En réception, on utilise parfois
une sonde de Wood développée également au laboratoire
pour des mesures en bande étroite. Les fréquences choisies
correspondent à des longueurs d’ondes de l’ordre du cm
et conduisent, avec des hauteurs d’eau de
quelques centimètres, à la présence de peu
de modes propagatifs (entre 3 et 6 modes
suivant les essais effectués).
Les signaux reçus sur l’hydrophone de
réception sont numérisés immédiatement
dès la sortie de l’hydrophone, à l’aide d’une
carte numérique d’acquisition qui se trouve
embarquée sur le chariot mobile (cf. Fig. 2). Les signaux
numérisés sont ensuite envoyés sur un calculateur « à terre »
au moyen d’une liaison ethernet. La liaison permet également
de transmettre les ordres de déplacement des chariots. On
peut donc ainsi se déplacer dans la cuve à un endroit spécifié
La propagation océanique en eau peu profonde : modèles et expérimentations
Tortuosité Porosité Perméabilité
[m
2
]
Vitesse des
ondes P [m/s]
Densité
[g/cm
3
]
Atténuation
à 100 kHz
[dB/m]
1, 31 0, 365 1, 65 e
-11
1 670
1, 999
60
Tabl. 1 : Paramètres géoacoustiques et géotechniques du sédiment
Fig. 1 : Dispositif expérimental