Version HTML de base




Spécial “ Acoustique sous-marine ”
27
Acoustique
&
Techniques n° 48
Cependant, la recherche de techniques toujours plus efficaces
de correction a abouti au développement d’une méthode
utilisant à la fois les données provenant des algorithmes
de compensation de mouvement et les données provenant
d’une centrale inertielle [16]. Ceci a montré une très bonne
efficacité. La figure 7 présente des images comparatives
de ces méthodes. On note la différence de précision de
focalisation entre chaque méthode.
Dans le même temps, la recherche de l’application SAS temps
réel a incité à l’étude de nouveaux algorithmes de formation
de voie. En acoustique sous-marine, la formation de voie
correspond à la formation de l’image à partir des récurrences
sonar. Dans ce domaine, la formation de voie temporelle est
la plus traditionnelle. Elle a l’avantage d’être exacte et facile
d’implémentation. Cependant, le temps de calcul nécessaire
à sa mise en œuvre est très pénalisant. D’autres méthodes
de formation de voie dans le plan fréquentiel sont apparues :
les algorithmes « Omega K » et « ChirpScaling » [17]. Leur
principal avantage est d’être généralement beaucoup plus
rapides. De plus, ces méthodes très proches ont l’avantage
d’être quasiment exactes. Elles présentent tout de même un
inconvénient non négligeable, la géométrie de calcul étant
figée, ces méthodes imposent une antenne linéaire uniforme.
Enfin, un nouvel algorithme appelé Fast Factorised Back
Projection (FFBP) a été repris en 2002 par Banks et Griffiths
[18]. Cette méthode utilise une formulation temporelle de
la formation de voie et propose un bon compromis entre la
vitesse de calcul et la précision attendue. Elle est en particulier
très bien adaptée aux trajectoires non rectilignes mais reste
tout de même difficile à implémenter.
Enfin, les nouveaux challenges de la synthèse d’ouverture
se situent aussi dans l’apport de nouvelles informations.
Le développement de l’interférométrie SAS apporte une
connaissance de la configuration en trois dimensions du
fond marin. Par ailleurs, la détection d’objets jusqu’alors
inaccessibles comme les objets enfouis devient enfin
possible.
Le traitement SAS pour la détection des
objets enfouis
L’histoire du SAS est donc en partie étroitement liée aux
applications militaires et en particulier à la détection et
classification des mines navales. Alors que les sonars
classiques permettent une bonne classification en utilisant
des fréquences élevées, l’apport du traitement SAS dans le
domaine permet pour une même longueur d’antenne d’utiliser
des fréquences plus basses tout en gardant une très bonne
résolution (de l’ordre de 10 cm). Étant donné les propriétés des
ondes sonores dans le milieu aquatique, plus les fréquences
utilisées sont basses et plus l’onde se propage loin. De plus, les
basses fréquences permettent de pénétrer le sédiment marin
(l’onde est moins atténuée) et donc d’avoir des informations
sur sa composition. Ce principe est d’ailleurs utilisé par les
sondeurs de sédiments. L’utilisation du traitement SAS en
basse fréquence permet alors de détecter les objets enfouis
dans le sédiment. Cette application se révèle intéressante
à la fois pour des applications civiles (suivi de pipeline par
exemple) et pour des applications militaires (détection
de mines enfouies). Cette thématique est actuellement
principalement développée par les États-Unis, l’Allemagne et
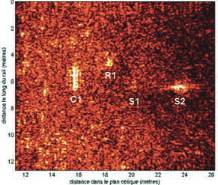
Fig. 8 : Exemple d’image d’objets enfouis ou non à 20 m.
Zone de 25 m × 12 m {support, données, traitement
GESMA} C1 : cylindre enfoui ; R1 : rocher enfoui ;
S1 : sphère enfouie ; S2 : sphère posée sur le fond
Fig. 9 : Exemple d’images obtenues avec un SAS basse fréquence monté en
sonar de coque. En haut, de haut en bas sur l’image : cylindre non
enfoui, cylindre semi-enfoui, cylindre enfoui et photos du bâtiment
support et du sonar. En bas, images d’épaves en baie de Douarnenez
Le Sonar à Antenne Synthétique (SAS), application à la guerre des mines