Version HTML de base




26
Spécial “ Acoustique sous-marine ”
Acoustique
&
Techniques n° 48
Si ces expérimentations sont issues de la guerre des mines, le
monde civil s’intéresse également au SAS. Ainsi, en 2001, le
projet IMBAT de Thales Underwater Systems a permis d’imager
le fond marin à très grandes distances à l’aide d’un sonar à
antenne synthétique interférométrique (technique permettant
d’obtenir une image en trois dimensions des fonds marins).
Grâce à ce sonar monté sur un « poisson » remorqué, des
images du canyon du Var en mer Méditerranée (2 000 m de
hauteur d’eau) ont été obtenues. La fréquence centrale utilisée
était de 45 kHz avec une bande de 10 kHz [15].
Les challenges de la synthèse d’ouverture
Aujourd’hui, le traitement d’antenne synthétique est une
technique mature. Il n’est plus question de savoir si ça marche
mais comment le rendre toujours plus efficace, plus robuste
et quelles vont être les applications qui profiteront de ces
avancées. Les critères principaux de performance d’une
antenne sonar étant la résolution et le taux de couverture,
ce sont ces deux grandeurs que l’on cherche dorénavant à
améliorer.
Normalement, la résolution d’une antenne est inversement
proportionnelle à la fréquence centrale et la longueur
d’antenne. Dans le cas de l’antenne synthétique, en augmentant
la longueur d’antenne, on peut ainsi obtenir une résolution
plus fine (voir encadré). Une autre restriction réside dans la
connaissance précise des retards des voies d’antenne, donc
des mouvements du porteur. Ceci est d’autant plus important
que le nombre de récurrences à intégrer est élevé. Pour avoir
une bonne connaissance des mouvements de l’antenne à partir
des données sonar, il faut que le déplacement longitudinal
entre deux récurrences n’excède pas la demi-longueur de
l’antenne physique :
.
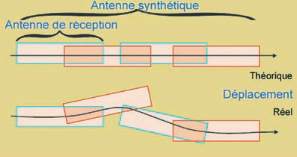
En comparaison avec l’application de la synthèse d’ouverture
dans le domaine radar, la compensation de mouvement
est rendue beaucoup plus difficile pour le sonar en raison
de la faible vitesse du son dans l’eau et de l’écartement de
trajectoire important avec la ligne droite idéale. La figure 6
illustre le principe de la compensation de mouvement.
Cette problématique a donné lieu ces dernières années à de
nombreuses recherches dans le domaine des techniques
dites d’autocalibration. Le principe de l’autocalibration réside
dans la comparaison des signaux reçus
sur deux capteurs entre une récurrence
et la suivante. En recherchant les paires
de capteurs les plus corrélées, on peut
déterminer les mouvements du porteur
entre chaque ping. Alors, on calcule de
façon récursive les retards et les directions
de pointage nécessaires pour la formation
de voie synthétique. Cette méthode est
connue sous le nom de DPC (Displaced
Phase Centre).
D’autres méthodes utilisent les propriétés
du signal reçu par chaque capteur pour
déterminer le mouvement de l’antenne,
on peut citer notamment le P2C2 (Ping to
Ping Cross-Correlation). Ces techniques
se sont révélées très efficaces pour
compenser les mouvements du sonar.
Fig. 6 : Illustration de la compensation de mouvement ou comment tenir
compte des mouvements du porteur dans le traitement SAS
Fig. 7 : Comparaison d’algorithmes de compensation de
mouvement et images SAS résultantes. Images de l’épave
de la Swansea Vale en baie de Douarnenez. (a) sans
correction (b) DPC uniquement (c) données de navigation
uniquement (d) Fusion de données DPC et navigation
Le Sonar à Antenne Synthétique (SAS), application à la guerre des mines