Version HTML de base




Spécial “ Acoustique sous-marine ”
25
Acoustique
&
Techniques n° 48
En pratique, cette antenne sonar dépend d’un porteur dont les
mouvements de roulis, tangage, lacet, cavalement, embardée
et pilonnement vont rendre plus difficile l’intégration le long
de la trajectoire.
Les premières expérimentations en mer ont été menées dans
la fin des années 1980 et le début des années 1990. Parmi
ces essais, sous couvert d’un projet européen, Manell Zakharia
a mené des expérimentations avec le sonar à antenne
synthétique basse fréquence ACID/SAMI. Fonctionnant autour
de 8 kHz, ce sonar de surveillance grand fond a donné des
résultats intéressants explicités dans [7]. Dans le même temps,
on note les travaux de P. Gough et M. Hayes de l’université de
Canterbury en Nouvelle-Zélande avec un prototype de SAS
monté sur un « poisson » remorqué (KIWI-SAS) [8]. Ce sonar
émettait alors dans deux bandes de fréquence : 20 – 50 kHz
et 80 – 100 kHz. En France, des expérimentations débutent
en 1994 sur un rail sous-marin dans la rade de Brest.
Par ailleurs, le milieu marin et l’utilisation de l’onde sonore
rendent la synthèse d’ouverture plus délicate en sonar qu’en
radar. Plusieurs solutions ont été apportées afin, d’une part,
de minimiser l’influence des perturbations de trajectoire du
porteur d’antenne et, d’autre part, dans le but d’augmenter le
taux de couverture. Dès lors, de nombreuses expérimentations
ont été effectuées afin de mettre au point des algorithmes
de focalisation et de compensation de mouvements. On
note notamment, dans les années 1990, les travaux du CSS
(Coastal Systems Station) aux États-Unis avec le sonar HF/LF
SAS ayant deux bandes de fréquence de travail : 10 – 30 kHz
et 165 – 195 kHz [9].
Au cours des différentes expérimentations, l’utilisation
d’antennes de réception multi hydrophones a suscité une
nouvelle approche. En effet, l’utilisation de la cohérence
entre paires d’hydrophones pour des pings successifs
permet d’estimer la trajectoire du porteur. Parmi les
techniques développées, on note celle de Thales Underwater
Systems (TUS) en France : le P2C2 (Ping-to-Ping Cross-
Correlation)[10]. De même, une technique de micronavigation
appelée DPC (Displaced Phase Centre) a été présentée par
le NURC (NATO Undersea Research Centre) dans les années
2000 [11]. L’évolution technologique des systèmes de
positionnement parallèlement au développement d’algorithmes
d’autofocalisation apporte cependant un peu plus de liberté
dans les mouvements du système SAS.
Des résultats décisifs
Dans ce paragraphe, nous présentons les résultats de
traitement obtenus par leGESMA lors de différentes campagnes
d’essais en mer. En 1999, le GESMA, en coopération avec
le centre de recherche anglais DERA, a mis en œuvre un
sonar à antenne synthétique (SAS) sur un rail sous-marin en
rade de Brest. Cette campagne mettait en œuvre un sonar
ayant une fréquence centrale de 150 kHz avec une bande
de 60 kHz donc une longueur d’onde moyenne de 1 cm. La
figure 3 présente une image résultat de cette campagne. La
résolution atteinte est de 4 cm à 50 m de distance (au lieu
de 1,8 m avec l’antenne physique) [12].
La volonté d’aller vers un système plus opérationnel et réaliste
est illustrée par plusieurs essais en mer avec des SAS montés
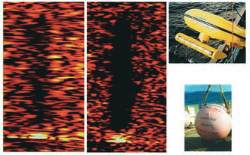
sur des porteurs réels. En 1997, des essais ont été réalisés
en baie de Douarnenez [13] avec un robot téléopéré muni d’un
sonar. La figure 4 présente une image obtenue lors de cette
campagne avec une fréquence centrale de 405 kHz et une
bande de 12 kHz. On y voit une sphère d’un mètre de diamètre
posée sur le fond avec une résolution de 36 cm.
Une campagne réalisée par le NURC en 2000 est un autre
exemple de système plus réaliste. Le sonar à antenne
synthétique était remorqué et fonctionnait dans la bande de
fréquence 90 - 110 kHz. La figure 5 présente une image
résultat de cette campagne. La résolution atteinte est de
7 cm à 50 m (au lieu de 80 cm en antenne physique). Cette
fois, les algorithmes développés prenaient plus finement en
compte des mouvements du porteur [14].
Fig. 3 : Exemple d’image de trois maquettes de mines modernes
obtenue à 55 m. Zone de 15 m × 10 m. {Support
GESMA, données DERA, traitement ENSIETA/GESMA}
Fig. 4 : Exemple d’image de sphère obtenue avec un SAS monté sur
un robot téléopéré. De gauche à droite, image sans traitement
SAS, image après intégration sur 8 pings et compensation de
mouvement, photos représentant le robot et la cible imagée
Fig. 5 : Exemple de 6 objets obtenu avec un sonar remorqué à 50 m.
Zone de 30 m × 30 m. {Support NURC, données NURC, traitement
ENSIETA/GESMA} et photo du sonar sur le rail du GESMA
Le Sonar à Antenne Synthétique (SAS), application à la guerre des mines