Version HTML de base


Spécial “ Acoustique sous-marine ”
15
Acoustique
&
Techniques n° 48
Systèmes associés : capteurs auxiliaires,
centrale de synchronisation
On a vu que le fonctionnement des sonars nécessite la
connaissance d’informations auxiliaires telles que la position et
lesmouvementsdubateau, lecap, la vitessedu son sur l’antenne
ou dans la colonne d’eau (profil bathycélérimétrique)… C’est
pourquoi les systèmes acoustiques doivent impérativement
être associés à différents capteurs :
- un système de navigation
pour la fourniture de la position
du navire. On utilise aujourd’hui presque exclusivement le
système GPS, en mode naturel, différentiel ou cinématique,
selon la précision de positionnement attendu. Le mode
cinématique, qui offre une très grande précision (de l’ordre
du centimètre), est couramment utilisé en zone côtière pour
la mesure de l’altitude de l’embarcation, c’est-à-dire la hauteur
de la marée.
- une centrale d’attitude
pour la mesure de l’attitude
(roulis, tangage, cap) et du pilonnement du navire. L’état de
l’art consiste à utiliser une centrale inertielle de technologie
FOG (gyroscopes à fibre optique). Les équipements les plus
modernes mesurent l’attitude avec une précision de l’ordre
du centième de degré, et le pilonnement avec une précision
décimétrique. Ils ont de plus l’avantage de lisser et entretenir
la position (en cas de coupure GPS).
- une horloge de référence
pour synchroniser précisément
l’ensemble des équipements scientifiques du navire. L’horloge
est elle-même calée à l’aide des signaux GPS.
- un célérimètre de coque
pour la mesure de la célérité au
voisinage des transducteurs. Cette information est utilisée par
les sondeurs multifaisceaux pour le pointage des faisceaux.
- un système de mesure du profil de célérité,
pour les
corrections de réfraction dans la colonne d’eau. Par petits
fonds, on utilise généralement un bathycélérimètre (mesure
de la pression et de la célérité) qui est mis en œuvre navire en
EM 120
EM 300
EM1002
EM 3002
Fréquence
12 kHz
33 kHz
95 kHz
300 kHz
Profondeur max
12 000 m
4 000 m
600 m
100 m
Ouverture angulaire
140°
140°
150°
130°
Niveau d’émission
(dB re 1uPa @1m)
242
237
225
216
Durée d’impulsion
en ms
2/5/15
0,7/2/5/15
0,2
0,15
Nombre de canaux réception
128
64
128
Nombre de faisceaux
réception
191
127
111
254
Largeur des faisceaux
(émission x réception)
1 x 1°
1 x 2°
2,3 x 2,3°
1,5 x 1,5°
Stabilisation des faisceaux
lacet/roulis/tangage
lacet/roulis/tangage roulis
roulis/tangage
Navire Porteur
BHO Beautemps Beaupré
(SHOM)
NO Le Suroît
(IFREMER)
NO L’Alis
(IRD)
Vedettes hydrographiques
du SHOM
Tabl. 3 : Principales caractéristiques des sondeurs multifaisceaux récents de la gamme Kongsberg
actuellement en service sur des navires scientifiques ou hydrographiques
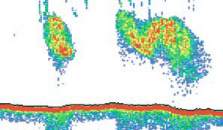
Fig. 12 : Coupe de deux bancs de harengs,
obtenue au sondeur monofaisceau
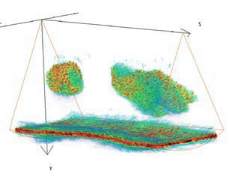
Fig. 13 : Représentation 3D des données obtenues à l’aide du sondeur
multifaisceau du NO Thalassa sur les bancs de la figure 13
Les équipements acoustiques des navires océanographiques