Version HTML de base


28
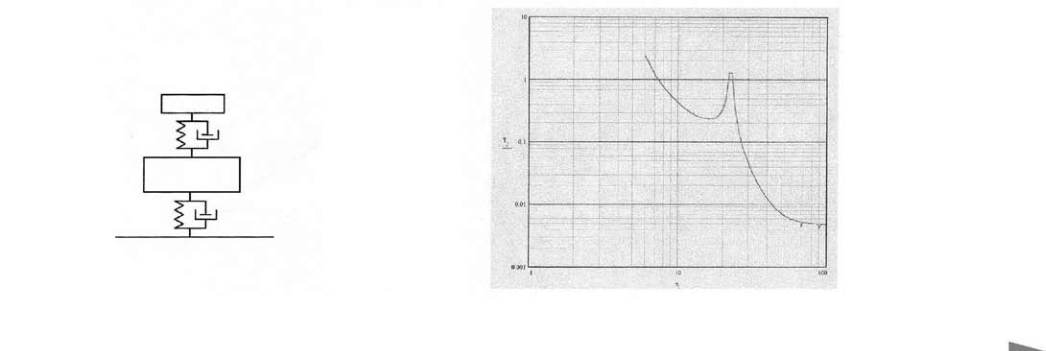
Le découplage de structures à l’aide d’isolateurs passifs
Les exemples de réalisation ne manquent pas, d’autant
plus que parfois l’implantation de machines lourdes sur
des terrains relativement souples en est facilitée.
La masse intermédiaire peut être plus légère que la masse
suspendue ; dans ce cas, la performance n’est améliorée
qu’à haute fréquence tandis que les modes supplémen-
taires introduits obèrent la ltration aux fréquences plus
basses. L’intérêt d’une telle suspension est aussi de permet-
tre d’annuler les déplacements absolus de la machine
suspendue quand elle est excitatrice et quand elle tourne
à vitesse constante. Il suf t de calculer la suspension pour
cela en positionnant les modes convenablement. De ce
fait, les déformations des éléments qui sont raccordés à
la machine s’en trouvent réduites.
Dans d’autres cas, elle est un moyen supplémentaire que
l’on se donne pour bien placer les modes par rapport aux
fréquences d’excitations.
La suspension pendulaire
Dans la course aux basses fréquences, elle constitue un
moyen d’y parvenir. Elle est assez simple à mettre en
œuvre dans le cas de sollicitation selon une seule direc-
tion. Dans les autres cas elle conduit à des conceptions
relativement encombrantes.
Le choix
Le choix entre les différents types est guidé par :
- le type d’excitation contre laquelle il faut se protéger ;
ceci est très important car la présence simultanée ou non
de plusieurs excitations très différentes du genre vibra-
tion et choc conduit à des compromis souvent assez
dif ciles à trouver ;
- le niveau de protection que l’on veut atteindre ;
- le prix que l’on est disposé à payer pour atteindre ce niveau ;
- les contraintes géométriques de la conception de l’en-
semble.
Une fois ce choix effectué, il faut déterminer les caracté-
ristiques physiques des plots (encore appelés Isolateurs)
de suspension et tout d’abord leurs raideurs et leurs amor-
tissements.
Choix des plots de suspension
Détermination des caractéristiques de raideurs
et d’amortissements
D’une façon générale, cette détermination n’est pas directe.
On a recours à une méthode par itérations successives en
faisant des calculs des réponses de la suspension pour
les différentes excitations spéci ées.
Ces calculs sont tributaires du modèle physique sensé
reproduire le comportement du plot. Au premier pas de
l’itération, il faut faire un premier choix de type de plots.
Si l’expérience ou les contraintes d’environnement ou de
coût ne sont pas suf santes pour guider ce choix préala-
ble, il est commun de considérer qu’un plot est représen-
table par un modèle de Kelvin équivalent. Selon chacune
des directions principales i du plot, on a donc une raideur
complexe: Ki* = Kj’ +j Ki” i= I à 6.
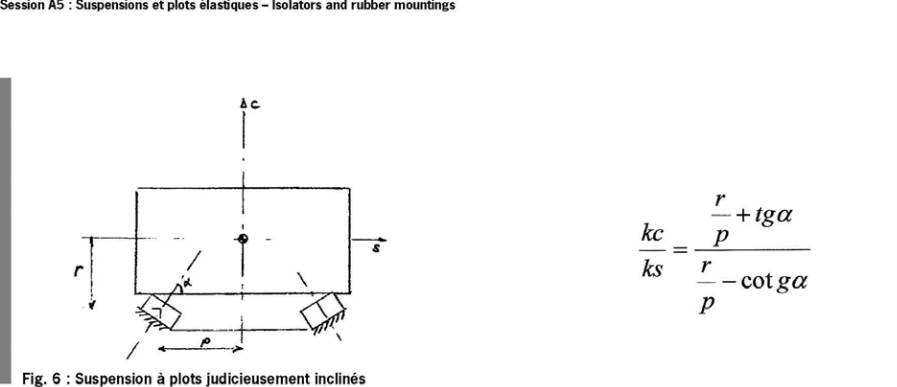
Fig. 6 : Suspension à plots judicieusement inclinés
Fig. 7 : Suspension double