Version HTML de base


26
Le découplage de structures à l’aide d’isolateurs passifs
alors utile de se reporter à des normes comme la MIL-STD-
810 E, la GAM-EG-13 qui sont remarquablement bien faites
et documentées. Cependant ces normes n’apportent pas
de réponses directes, elles permettent de xer des enve-
loppes qui peuvent se révéler trop pénalisantes si leur
choix n’a pas été fait avec discernement avec l’aide de la
connaissance de la nature, de la direction des efforts ou
des déplacements perturbateurs.
Notons que la description des chocs doit être faite avec
soin car ils entraînent en général de grands débattements
qui font entrer les ressorts dans des zones de fonctionne-
ment non linéaires, dans ce dernier cas la description par
spectre de choc peut alors donner lieu à des évaluations
assez éloignées de la réalité ;
- une description des niveaux admissibles, en général de l’ac-
célération et du déplacement relatif de la structure à protéger
ou des éléments qui permettent de quanti er l’atténuation
souhaitée. Quelquefois, cette dernière est caractérisée par
le rapport des accélérations en amont (coté excitation) et en
aval des ressorts, cette manière de faire n’est intéressante
que dans la mesure où elle est accompagnée d’au moins une
donnée chiffrée sur la raideur de la structure aval ;
- une description des contraintes de maintenance ;
- une description des contraintes économiques.
Choix du type de suspension
Les types de suspension sont assez nombreux, nous
pouvons citer :
La suspension simple pendulaire ou non
Elle consiste à placer la masse à suspendre sur des isola-
teurs disposés directement entre elle et la structure dont
elle doit être découplée (Fig. 3). Pour peu que le choix
du type d’isolateur et sa disposition soient judicieux, ce
type de suspension n’est pas très onéreux pour la perfor-
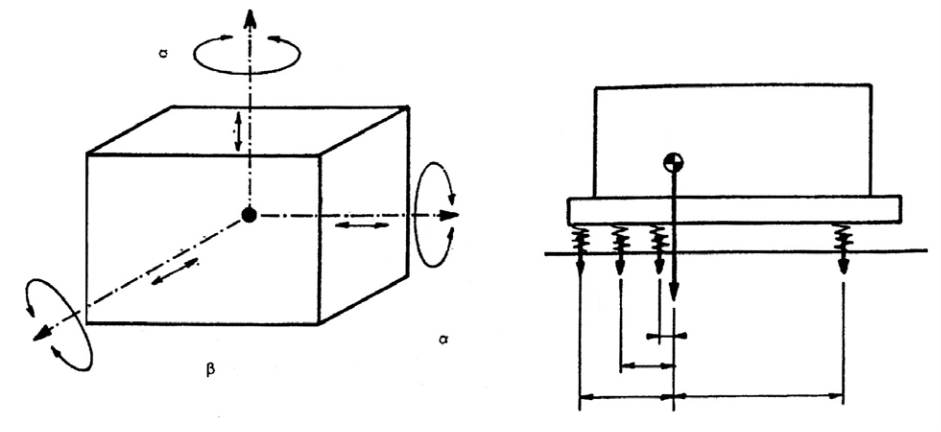
mance qu’il permet d’atteindre. Une des principales ques-
tions qui se posent dans sa mise en œuvre est : doit-on
ou non découpler les modes de corps solide ?
Le découplage est recherché pour limiter les débatte-
ments des extrémités du corps suspendu, ou pour éviter
d’avoir un mode en coïncidence avec une fréquence d’ex-
citation. Le couplage de deux modes se traduit physique-
ment par un couplage des mouvements selon les degrés
de liberté auxquels ils se rapportent. Dans ce cas de
suspension il est assez commun d’avoir une translation
couplée avec une rotation qui produit des déplacements
importants des déplacements importants des extrémités
de la structure suspendue.
Fig. 4 : Exemple de l’effet de couplage sur la
transmission d’une suspension
Sans entrer dans les détails que l’on trouve dans les
nombreux ouvrages spécialisés citons quelques moyens
pour assurer ce découplage :
- Dans la mise en équation du problème, le couplage des
modes de translation et de rotation est gouverné par des
coef cients qui mettent en jeu les raideurs des plots et
leurs coordonnées par rapport au centre de gravité.
Fig. 3 : Suspension simple pendulaire
Mouvement
de lacet
Mouvement
vertical
G
Z
Y
G
P
P3 P2 P1
Pb
a1
a2
a3
b
X
Mouvement
longitudinal
Mouvement
de roulis
Mouvement de galop
(ou de tangage)
Mouvement d
transversal