Version HTML de base


10
Capteurs résonants M/NEMS et phénomènes
non linéaires
Contexte et motivation
Les importantes avancées dans la micro-fabrication des
M/NEMS (Micro et Nano Electro-Mechanical Systems)
de ces dernières années ont apporté des développe-
ments conséquents dans la navigation, les télécommu-
nications, les jeux vidéo, etc.
Depuis le milieu des années 80, la majorité de ces systè-
mes fonctionne grâce à des micro résonateurs qui sont
utilisés comme capteurs [1]. Mais c’est dans les années
90, pour répondre aux besoins de système de communi -
cation sans fil, que les résonateurs de type MEMS, dotés
de grand facteur de qualité et de haute fréquence de
fonctionnement ont été développés. Aujourd’hui ce sont
les NEMS qui sont au cœur des recherches fondamen-
tales et appliquées. En 2010 les capteurs résonants M/
NEMS de type accéléromètres et gyroscopes devraient
représenter un marché de 2 500 M€ et de 800 M€
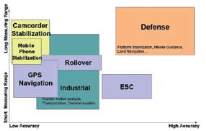
respectivement. En ce qui concerne en particulier les
gyromètres MEMS, on distingue trois grands domaines
applicatifs: Le domaine automobile (environ 80% du
marché avec plus de 25 millions d’unités vendues par
an, pour principalement les GPS, la détection de roulis
et l’ESP
1
), le domaine grand public (secteur d’applica-
tion nécessitant des performances assez faibles mais
avec des objectifs de coût très agressifs, encore réduit
en terme de part de marché, mais c’est aussi celui qui
présente avec le marché automobile le plus de potentiel
de développement de croissance, pour les systèmes
de stabilisation pour les scanners optiques, les appa-
reils photos, les caméscopes, et très prochainement
dans le marché très prometteur des jeux comme l’en-
trée fulgurante de la console Nintendo WII ), le domaine
avionique/défense (les applications concernent princi -
palement les UMI (unités de mesure inertielle) pour la
navigation, la stabilisation de plates-formes, le guidage
de missile), voir la figure 1.
1- Electronic Stability Program ou ESC pour Electronic Stability Control
Fig. 1 : Applications des gyromètres en fonction de leur classe
La plupart des NEMS sont des dispositifs résonants avec
des dimensions submicroniques. À ce niveau de taille,
les NEMS ont des fréquences de résonance extrême-
ment hautes pouvant atteindre 1 GHz, des masses acti-
ves faibles, des constantes de force tolérables et des
facteurs de qualité très élevés, de l’ordre de 100 à 10000.
Cet ensemble d’attributs confère aux résonateurs NEMS
une multitude d’applications technologiques comme les
capteurs de force ultra-sensibles, les filtres à très grande
bande passante, les capteurs de masse, [2]. Grâce à sa
simplicité et son rendement, l’activation électrostatique
est la technique la plus utilisée.
La conception des capteurs résonants se doit donc d’in-
tégrer sur un même dispositif, des parties MEMS pour la
masse, les pistes des électrodes les ancrages mécani-
ques et des parties NEMS pour les électrodes et le ou
les résonateurs. Tout cela pour diminuer les dimensions
du capteur et améliorer ses performances.
Cependant les capteurs résonants de type M/NEMS ont
un comportement non linéaire qui se produit rapidement
à cause de leurs dimensions sub-microniques.
Najib Kacem, Sébastien Hentz
CEA-LETI
MINATEC
17, rue des martyrs
38054 Grenoble Cedex 9
E-mail : sebastien.hentz@cea.fr
Sébastien Baguet, Régis Dufour
CNRS UMR 5259
INSA-Lyon
LaMCoS
Bâtiment Jean d’Alembert
18-20, rue des sciences
69621 Villeurbanne Cedex
E-mail : regis.dufour@insa- lyon.fr