Version HTML de base


Spécial “ Electroacoustique ”
25
Acoustique
&
Techniques n° 52
Haut-parleurs électrodynamiques : défauts des moteurs classiques, performances des moteurs sans fer
Ce dernier point implique que cette structure est adaptée
pour des transducteurs où la bobine a un petit déplacement,
donc pour les hauts medium et les tweeters.
Dès que le diamètre du haut-parleur augmente, il est
économiquement plus intéressant d’utiliser des aimants
annulaires ou, pour éviter de les usiner, des bagues portant
des tuiles aimantées radialement.
Exemple d’évolution : pour augmenter le facteur de force
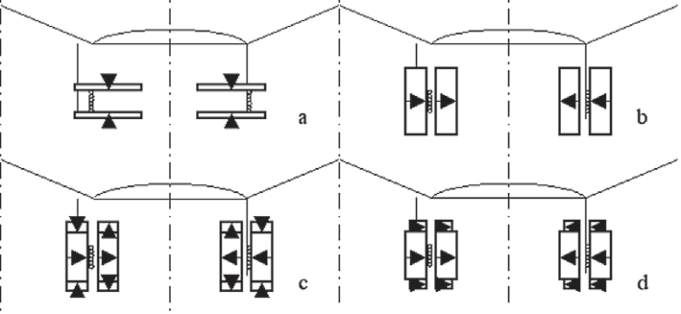
La figure 7 présente diverses structures de moteurs sans
fer. Elle permet d’illustrer, de façon non exhaustive bien
sûr, la diversité de réalisation du concept. Parmi ces
exemples, certaines structures de moteurs sans fer sont
plus simples que d’autres ou utilisent moins d’aimant, mais
les caractéristiques diffèrent aussi d’une structure à l’autre,
en termes de fuites ou d’uniformité de l’induction dans
l’entrefer. Selon que l’une ou l’autre des caractéristiques
apparaît plus importante, et qu’on essaye de chercher la
meilleure structure vis-à-vis de cette caractéristique, on
arrive à des structures optimales différentes.
Si c’est le facteur de force qu’on cherche à augmenter et
surtout à rendre constant sur la plus grande zone possible
de déplacements de la bobine, alors c’est une structure
du type de celle de la Fig.7-d qu’il faut adopter. Le moteur
est constitué de l’empilement de trois bagues porteuses
d’aimants d’aimantations radiales, toutes de même direction
centripète (ou centrifuge). La bobine est interne au cylindre
d’aimants. C’est une bobine courte, dont la hauteur est une
fraction de la hauteur de l’aimant central. La particularité de
ce moteur réside dans le fait que les aimants de la bague
centrale n’ont pas la même aimantation rémanente que
les aimants des deux bagues d’extrémité. Cette famille de
structures fait actuellement l’objet des travaux de thèse
de Benoît Merit au LAUM. L’induction magnétique dans
l’entrefer de ce type de moteur est uniforme sur toute la
hauteur de l’aimant central, donc le facteur de force est
constant sur toute cette zone. C’est la structure la plus
efficace de ce point de vue.
Si on s’intéresse plus à l’aspect «fuites magnétiques», on
choisira une structure à aimants prismatiques, car elle est
rigoureusement sans fuites.
En termes de poids, les aimants sont aussi lourds que le
fer. Mais supprimer le fer et faire travailler l’aimant dans de
meilleures conditions (choix de son point de fonctionnement,
conditions optimales si structure sans fuites) permettent de
diminuer environ par trois le volume d’aimants par rapport
à une structure classique. Sans fer et avec trois fois moins
d’aimant, la structure obtenue est beaucoup plus légère
qu’une structure classique, et la puissance massique
nettement augmentée !
La suspension et les joints ferrofluides
La suspension classique disparaît. Elle est remplacée par
deux joints en ferrofluides, qui ont un rôle multiple. Rappelons
ici que les ferrofluides sont des solutions colloïdales, dans
lesquelles des grains de matériau magnétique (souvent de
la magnétite, Fe
3
O
4
) baignent dans un liquide, eau, huile,
hydrocarbure, solvant organique. Comme il s’agit d’une
solution colloïdale, on ne peut pas séparer le fluide des
grains. Ces matériaux ont des propriétés magnétiques,
liées à celles des grains, et viscoélastiques, liées au
liquide. Leur comportement est très complexe, relevant
de la magnétohydrodynamique.
Les joints ferrofluides sont “fixés” aux extrémités du moteur
par les gradients de champ magnétique qui existent à la
frontière axiale aimant-air. Les grains sont attirés par les
gradients et comme le fluide est «piégé» autour des grains,
le ferrofluide reste dans ces zones. L’équipage mobile glisse
sur le joint. La raideur axiale du dispositif est nulle. Les
propriétés magnétiques du matériau permettent au joint
d’assurer le guidage et le centrage de l’équipage mobile.
L’utilisation d’un ferrofluide permet d’obtenir le centrage
statique, mais aussi le centrage dynamique. Les propriétés
du liquide créent l’étanchéité entre les faces du haut-parleur.
Le ferrofluide contribue également à l’évacuation de la
chaleur et au refroidissement de la bobine. Il joue aussi un
rôle d’amortissement des modes de torsion de l’équipage
mobile.
L’enceinte : un tube
Dans notre concept, l’équipage mobile est assimilé à un
piston. L’enceinte associée au dispositif est un tube de
diamètre voisin de celui de l’équipage mobile. C’est l’air
contenu dans le tube qui remplit la fonction de suspension.
Cette dernière est donc pneumatique et exploite les
propriétés de l’air. Elle a ainsi un comportement très linéaire.
La raideur associée est
inversement proportionnelle
au volume de l’enceinte.
On sait que les haut-parleurs
fonctionnent au-delà de la
fréquence de résonance
mécanique du système,
qu i est i nversement
proportionnelle à la racine
carrée du rapport raideur
sur masse du système.
Pour que la fréquence de
résonance soit basse, on
cherche à avoir un rapport
raideur sur masse faible. Et
comme on veut aussi une
masse faible (diminution de
la taille) cela nécessite une
Fig.7 : Exemples de structures de moteurs sans fers