Version HTML de base






10
Spécial “ Electroacoustique ”
Acoustique
&
Techniques n° 52
Conception d’actuateurs dipolaires pour dispositif de contrôle actif de bruit
Du point de vue des performances, la figure 9-a montre une
simulation de l’excursion de la membrane du haut-parleur
en fonction de la fréquence pour une excitation sinusoïdale
de 10 Vrms : l’excursion de la membrane reste toujours
nettement en-dessous de la limite linéaire quelle que soit
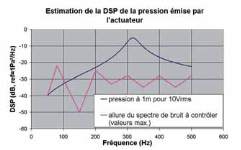
la fréquence d’excitation. La figure 9-b montre quant à
elle une estimation de la Densité Spectrale de Puissance
générée par l’actuateur à 1 m dans l’axe, pour un niveau
d’excitation RMS de 10 V répartit uniformément sur la bande
de fréquences 50 Hz/500 Hz. On constate que le niveau
généré est largement supérieur à celui du bruit à contrôler
excepté en-dessous de 100 Hz. Ceci n’est pas pénalisant
car une égalisation du spectre envoyé à l’actuateur,
accentuant l’amplitude de l’excitation en-dessous de 200
Hz au détriment des fréquences plus élevées, permet de
corriger le manque de niveau aux basses fréquences.
Mise au point et fabrication des actuateurs
Pour finaliser la conception, un premier prototype fonctionnel
a été réalisé sur la base des résultats présentés ci avant.
De nouvelles itérations ont été nécessaires notamment
pour ajuster les longueurs des évents et les volumes des
résonateurs de Helmholtz. En effet, lorsque les fréquences
de résonance des deux Helmholtz ne sont pas parfaitement
accordées, une dissymétrie apparaît qui génère une
composante monopolaire et dégrade fortement la directivité
de l’actuateur. Les relevés expérimentaux présentés en
figure 10 illustrent ce point : avec un actuateur mal réglé,
il apparaît une composante monopolaire vers 250 Hz dont
l’amplitude est supérieure à celle de la composante dipolaire.
Lorsque l’actuateur est correctement réglé, on constate par
ailleurs un bon accord entre la simulation de la pression
acoustique rayonnée dans l’axe et celle mesurée.
Concernant le développement, le point critique a été la
combinaison de la contrainte sur l’encombrement de
l’actuateur et de la dissymétrie entre l’avant et l’arrière
du haut-parleur. En effet, cela introduit une incertitude non
négligeable sur les volumes de charge du transducteur car
ceux-ci sont relativement faibles (de l’ordre du litre). D’autre
part, l’encombrement défini pour l’actuateur a imposé
une longueur différente pour chacun des deux évents.
Compte tenu de ces éléments, il est impossible que les
caractéristiques des deux Helmholtz soient parfaitement
identiques : l’objectif est de les rendre les plus proches
possible. Pour cela, la monture du haut-parleur a été
modifiée pour pouvoir effectuer un équilibrage fin des
volumes après montage. Les actuateurs livrés sont
présentés en figures 11.
Conclusion
Soixante-quatre actuateurs ont été fournis pour être
installés sur site expérimental (figure 12). Lors de
mesures préliminaires, les niveaux fournis par les
actuateurs ont été jugés satisfaisant. Les figures 13
et 14 présentent des exemples de résultat obtenus par
Fig. 9-a : Performances de l’actuateur : simulation de
l’excursion de la membrane du haut-parleur
Fig. 9-b : Performances de l’actuateur : Densité Spectrale
de Puissance de la pression émise
Fig. 10 : Courbes de réponse en pression montrant l’impact
d’un accord différent des deux Helmholtz
Fig. 11 : Fabrication de la série et vue de
l’actuateur monté sur son support